
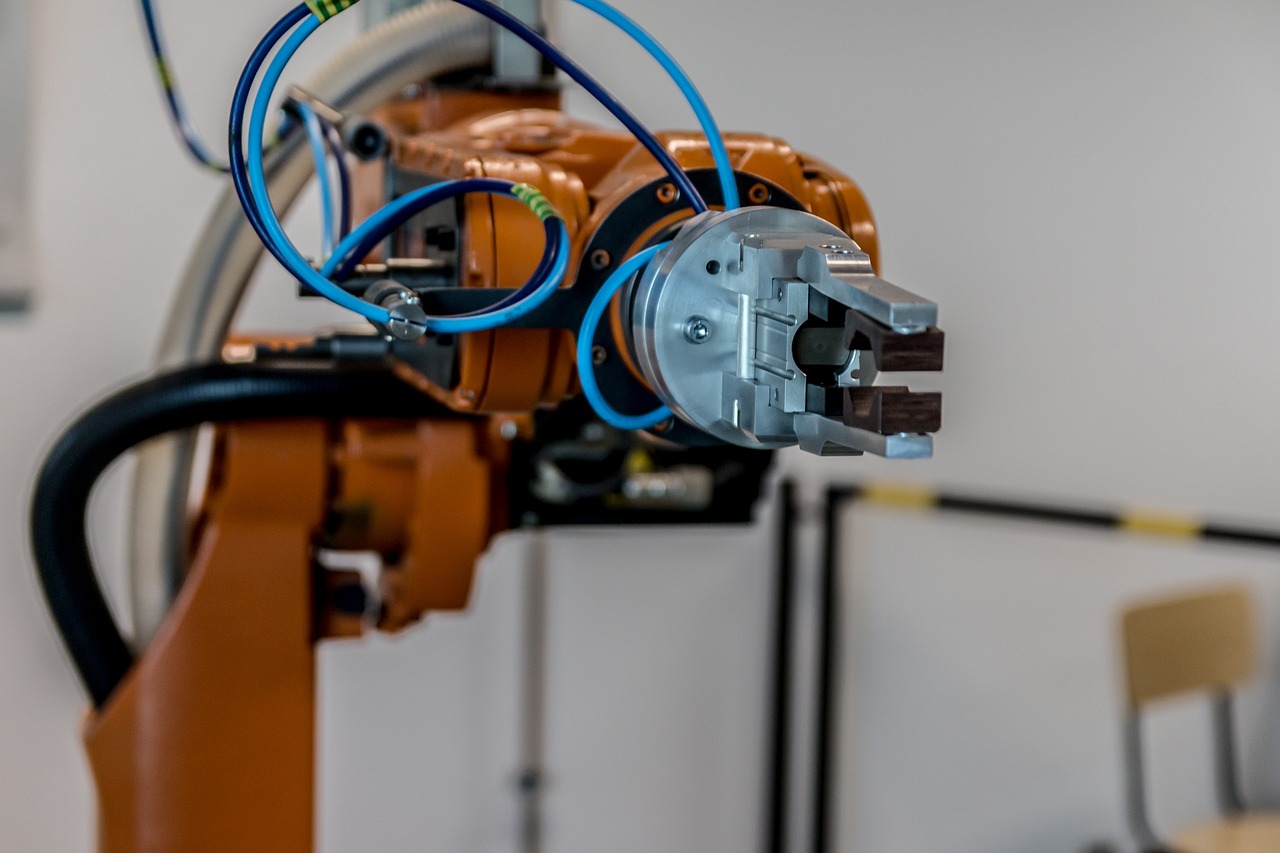
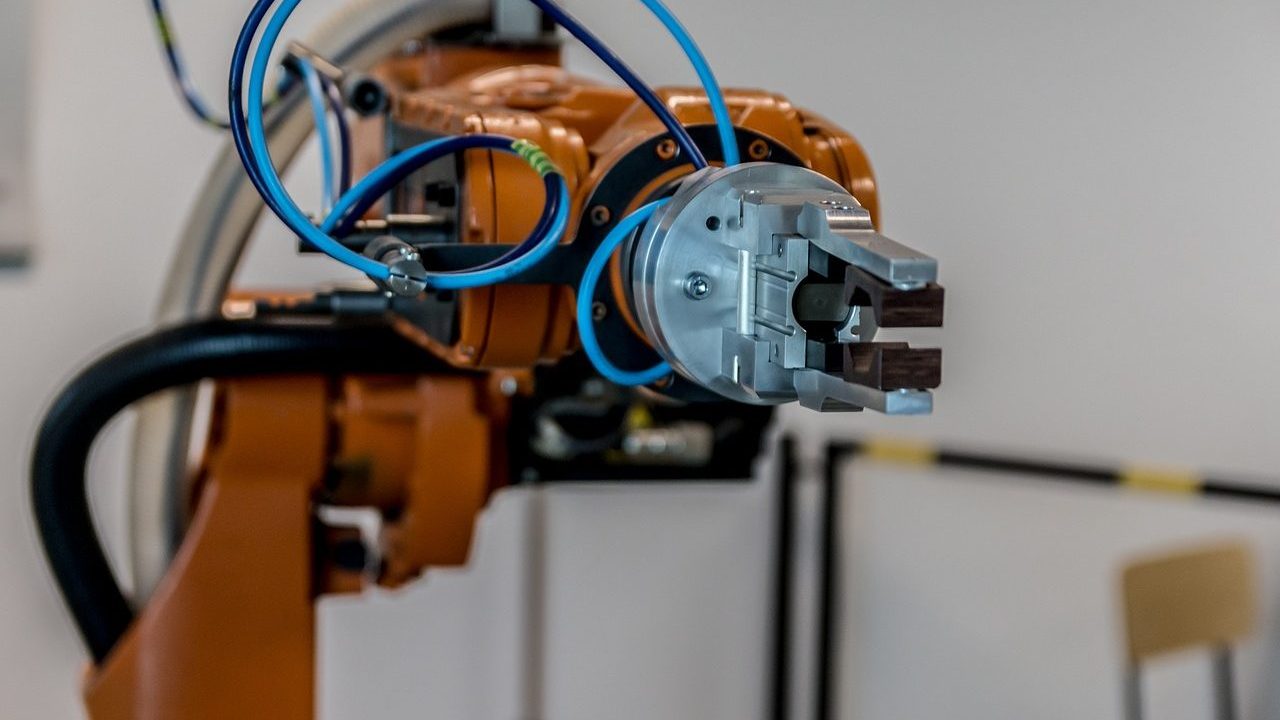
Roboter bestehen aus einer Architektur (z.B. Sensoren und Aktoren), sie sind bilden ein sogenanntes Informatiksystem, wie auch aus der Programmierung. Sie erledigen oft mechanische Arbeiten, können programmiert werden und verfügen über freibewegliche Teile wie Arme oder Räder. In modernen Robotern – im Unterschied zum Anfangsunterricht in der Schule – wird oft auch künstliche Intelligenz eingesetzt.
Roboter haben in unseren Alltag, z.B. als (teil-)autonome Fahrzeuge, Staubsaug– oder Rasenmäherroboter und insbesondere in der industriellen Herstellung bereits fussgefasst. Gerade im Alltag bestehen aber eher wenig Möglichkeiten hinter die Kulissen dieser Roboter zu sehen und diese aktive anzupassen. So kann z.B. bei Staubsaugerrobotern maximal die Zeit eingestellt werden, von wann bis wann er fahren soll. Auf gesellschaftlicher Ebene ist es zudem nötig sich die gesellschaftlichen Konsequenzen von Robotern zu reflektieren z.B. Fragen der ethischen Entscheidungen (z.B. bei autonomen Fahrzeugen), der Sinnhaftigkeit des Einsatzes (z.B. wenn dadurch Arbeitsplätze ersetzt werden oder der Einsatz als Kriegsmaterial), der Möglichkeiten zur Unterstützung von Menschen (z.B. durch Exoskelette).
Durch die fortschreitende Verwebung der Roboter mit unserer Lebenswelt wird es unabdingbar Roboter zu verstehen und grundlegende Strategien zu kennen, um Roboter zu manipulieren. Dies sowohl auf der Ebene der Bedienoberfläche (z.B. sich auf der Benutzeroberfläche eines Staubsaugerroboter orientieren, um Zeiten einzustellen) sowie auf der Ebene der Architektur (z.B. Rad klingen ersetzen des Rasenmäherroboter).
In der Praxis kann eine Annäherung auf unterschiedliche Art gemacht werden z.B. über Bee- und BlueBots, OzoBots, Lego SPIKE oder Thymio. Einen stärkeren Blick auf das dahinterliegenden Informatiksysteme ermöglichen Mikrocontroller wie MicroBit oder Calliope, wenn sie durch entsprechendes Material ergänzt werden.
![]()
![]() BY Konsortium MIA21
BY Konsortium MIA21
Dieser Beitrag ist lizenziert unter der Creative Commons Namensnennung 4.0 International Lizenz (CC BY 4.0).
